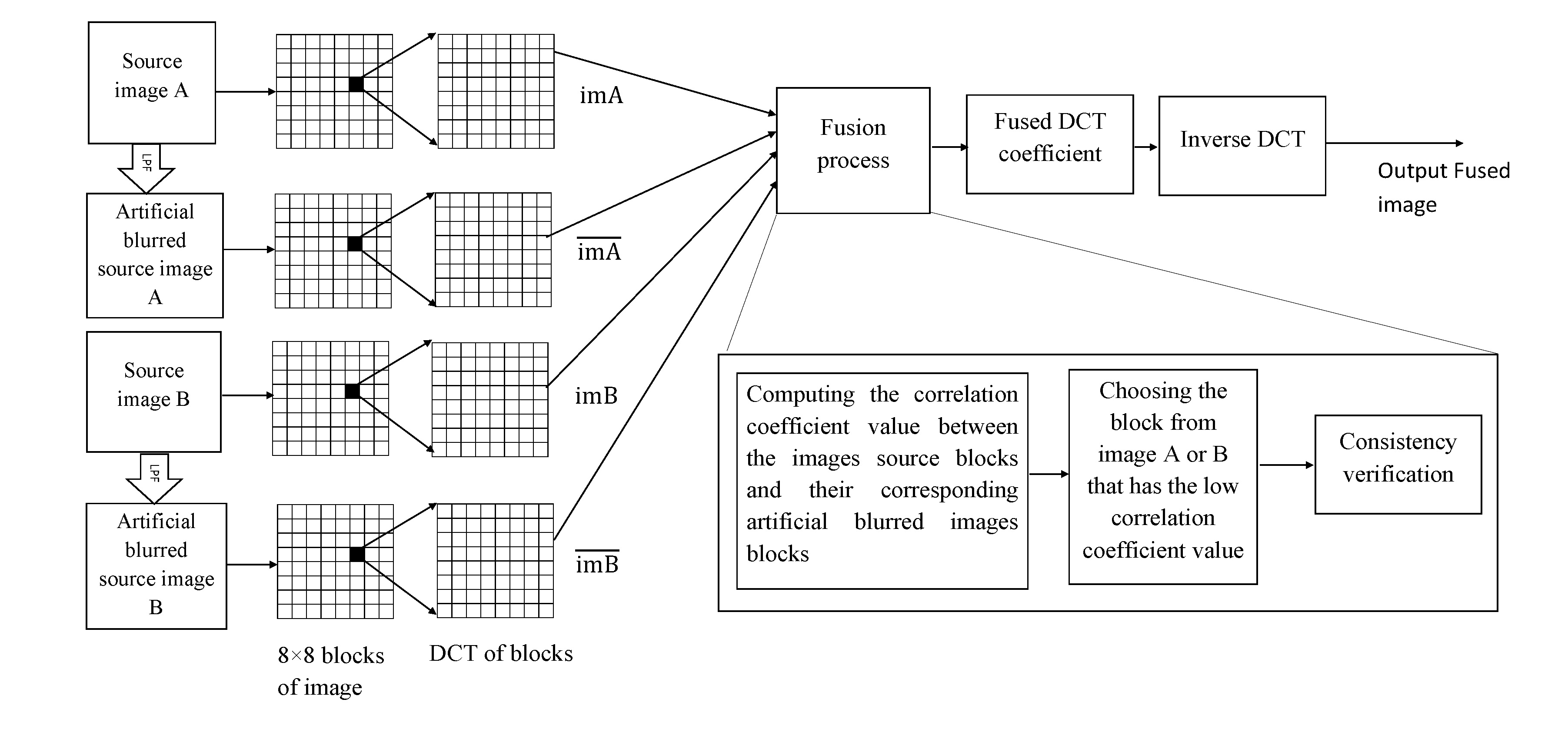
Abstract: Multi-focus image fusion is used to collect useful and necessary information from input images with different focus depths in order to create an output image that ideally has all information from input images. In this article, an efficient, new and simple method is proposed for multi-focus image fusion which is based on correlation coefficient calculation in the discrete cosine transform (DCT) domain. Image fusion algorithms which are based on DCT are very appropriate, and they consume less time and energy, especially when JPEG images are used in visual sensor networks (VSN). The proposed method evaluates the amount of changes of the input multi-focus images when they pass through a low pass filter, and then selects the block which has been changed more. In order to assess the algorithm performance, a lot of pair multi-focused images which are coded as JPEG were used. The results show that the output image quality is better than that of the previous methods.
(C) Mostafa Amin-Naji, Babol Noshirvani University of Technology, Mostafa.Amin.Naji@Gmail.com, PLEASE CITE THE ABOVE PAPERS IF YOU USE THIS CODE My Official Website: www.Amin-Naji.com
Multi-focus image fusion in DCT domain based on correlation coefficient MATLAB Code is the simulation of the following multi-focus image fusion methods in DCT domain:
(1) DCT+Corr (2) DCT+Corr+CV
proposed in:
M. A. Naji and A. Aghagolzadeh, “Multi-focus image fusion in DCT domain based on correlation coefficient,” in 2015 2nd International Conference on Knowledge-Based Engineering and Innovation (KBEI), 2015, pp. 632-639.https://doi.org/10.1109/KBEI.2015.7436118
Matlab Code:
function [FusedDCTCorr,FusedDCTCorr_CV]= DCT_Corr(im1, im2)
% C)Mostafa Amin-Naji, Babol Noshirvani University of Technology,
% My Official Website: www.Amin-Naji.com
% My Email: Mostafa.Amin.Naji@Gmail.com% PLEASE CITE THE BELOW PAPERS IF YOU USE THIS CODE
% M. A. Naji and A. Aghagolzadeh, “Multi-focus image fusion in DCT domain
% based on correlation coefficient,” in 2015 2nd International Conference
% on Knowledge-Based Engineering and Innovation (KBEI), 2015, pp. 632-639.
% https://doi.org/10.1109/KBEI.2015.7436118% Inputs:
% im1 : First source image
% im2 : Second source image
%
% Outputs:
% FusedDCTCorr : Fused image as the result of “DCT+Corr” method
% FusedDCTCorr_CV : Fused image as the result of “DCT+Corr+CV” method
%
%
% Sample use:
% im1 = imread(‘book11.tif’);
% im2 = imread(‘book2.tif’);
% [FusedDCTCorr,FusedDCTCorr_CV]= DCT_Corr(im1, im2);if nargin ~= 2 % Check the correct number of arguments
error(‘There should be two input images!’)
endif size(im1,3) == 3 % Check if the images are grayscale
im1 = rgb2gray(im1);
end
if size(im2,3) == 3
im2 = rgb2gray(im2);
endif size(im1) ~= size(im2) % Check if the input images are of the same size
error(‘Size of the source images must be the same!’)
end% The Artificial Blurred images are obtained by passing The Images through a
% low-pass filter (5×5 Averaging Filter)
im1low=imfilter(im1,fspecial(‘average’,5),’symmetric’);
im2low=imfilter(im2,fspecial(‘average’,5),’symmetric’);% Get input image size
[m,n] = size(im1);
FusedDCTCorr = zeros(m,n);
FusedDCTCorr_CV = zeros(m,n);
Map = zeros(floor(m/8),floor(n/8));% Level shifting
im1 = double(im1)-128;
im2 = double(im2)-128;
im1low = double(im1low)-128;
im2low = double(im2low)-128;% Divide source images into 8*8 blocks and perform the fusion process
for i = 1:floor(m/8)
for j = 1:floor(n/8)im1_Block = im1(8*i-7:8*i,8*j-7:8*j);
im2_Block = im2(8*i-7:8*i,8*j-7:8*j);
im1_Block_Blurred = im1low(8*i-7:8*i,8*j-7:8*j);
im2_Block_Blurred = im2low(8*i-7:8*i,8*j-7:8*j);% Compute the 2-D DCT of 8*8 blocks
im1_Block_DCT = dct2(im1_Block);
im2_Block_DCT = dct2(im2_Block);
im1_Block_Blurred_DCT = dct2(im1_Block_Blurred);
im2_Block_Blurred_DCT = dct2(im2_Block_Blurred);% Calculate normalized transform coefficients
im1Norm = im1_Block_DCT ./ 8;
im2Norm = im2_Block_DCT ./ 8;
im1Normlow = im1_Block_Blurred_DCT ./ 8;
im2Normlow = im2_Block_Blurred_DCT ./ 8;% Mean value of 8*8 block of images (or DC Coefficient)
im1ave = mean(mean(im1Norm));
im2ave = mean(mean(im2Norm));
im1avelow = mean(mean(im1Normlow));
im2avelow = mean(mean(im2Normlow));%Calculate Correlation Coefficient between im1 and artificial blurred of im1 in DCT domain
a = im1_Block_DCT – im1ave;
b = im1_Block_Blurred_DCT – im1avelow;
im1cor = sum(sum(a.*b))/sqrt(sum(sum(a.*a))*sum(sum(b.*b)));%Calculate Correlation Coefficient between im2 and artificial blurred of im2 in DCT domain
a = im2_Block_DCT – im2ave;
b = im2_Block_Blurred_DCT – im2avelow;
im2cor = sum(sum(a.*b))/sqrt(sum(sum(a.*a))*sum(sum(b.*b)));% Fusion Process
if im1cor > im2cor
dctCorrBlock = im2_Block_DCT;
Map(i,j) =+1; % Consistency verification
end
if im1cor <= im2cor
dctCorrBlock = im1_Block_DCT;
Map(i,j) = -1; % Consistency verification
end% Compute the 2-D inverse DCT of 8*8 blocks and construct fused image
% DCT+Corr Method
FusedDCTCorr(8*i-7:8*i,8*j-7:8*j) = idct2(dctCorrBlock);end
end% Concistency verification (CV) with Majority Filter (3×3 Averaging Filter)
Filter=fspecial(‘average’,3);
Map_Filtered = imfilter(Map, Filter,’symmetric’);
% The CV process
for i = 1:m/8
for j = 1:n/8if Map_Filtered(i,j) < 0
FusedDCTCorr_CV(8*i-7:8*i,8*j-7:8*j) = im1(8*i-7:8*i,8*j-7:8*j);
else
FusedDCTCorr_CV(8*i-7:8*i,8*j-7:8*j) = im2(8*i-7:8*i,8*j-7:8*j);
endend
end% Inverse level shifting
im1 = uint8(double(im1)+128);
im2 = uint8(double(im2)+128);
FusedDCTCorr = uint8(double(FusedDCTCorr)+128);
FusedDCTCorr_CV = uint8(double(FusedDCTCorr_CV)+128);% Show Images Table
subplot(2,2,1), imshow(im1), title(‘Source image 1’);
subplot(2,2,2), imshow(im2), title(‘Source image 2’);
subplot(2,2,3), imshow(FusedDCTCorr), title(‘”DCT+Corr” fusion result’);
subplot(2,2,4), imshow(FusedDCTCorr_CV), title(‘”DCT+Corr+CV” fusion result’);% Good Luck
% Mostafa Amin-Naji 😉



