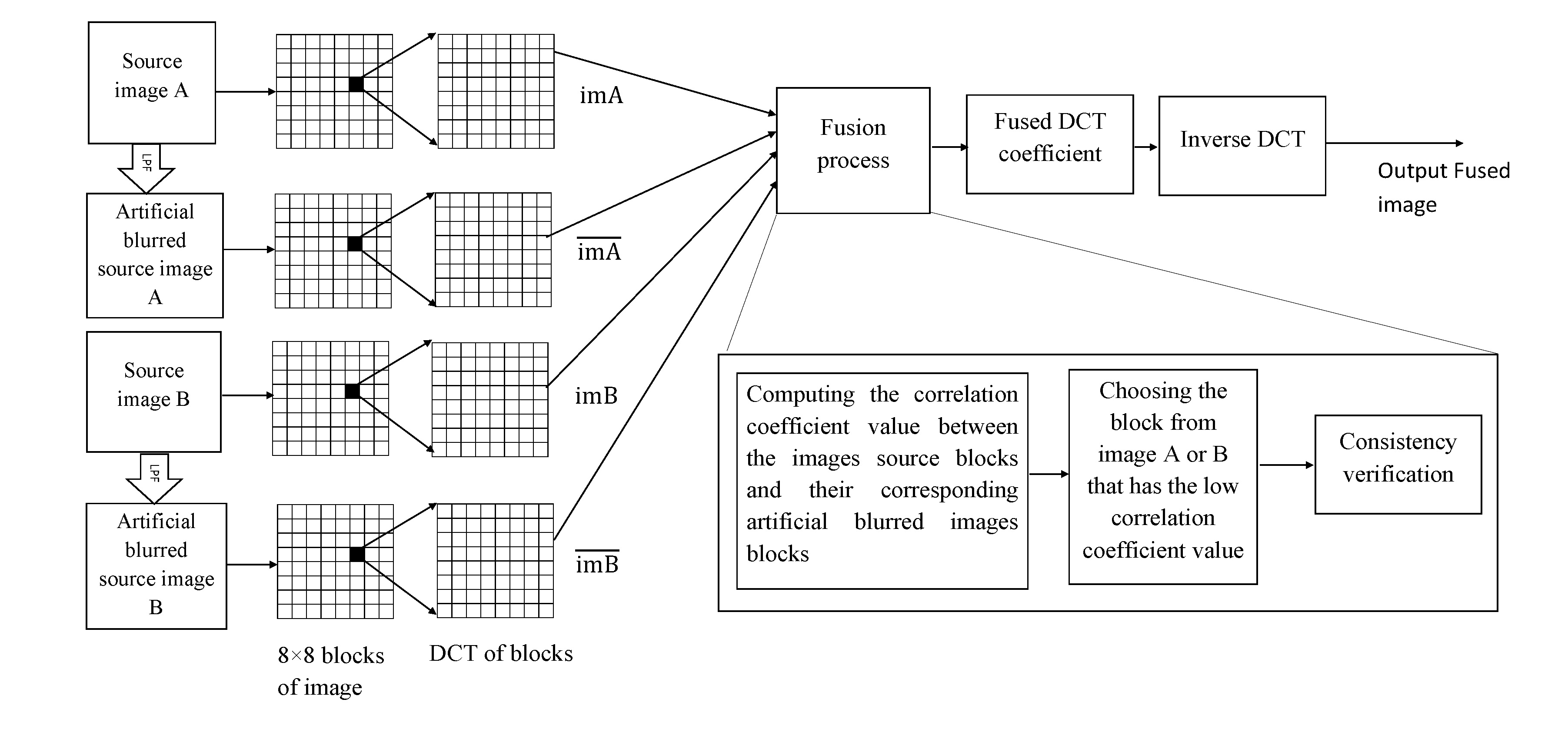
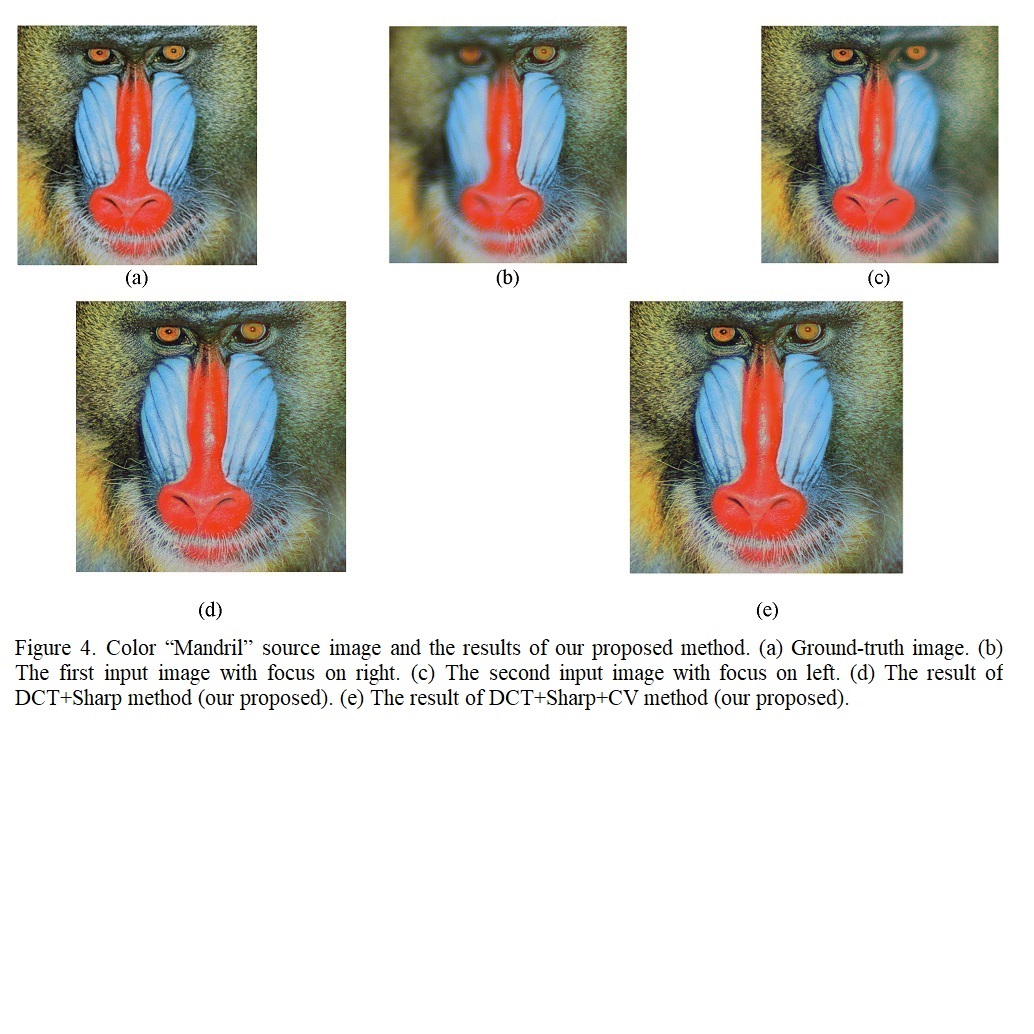
Abstract: Image fusion process is defined as extracting information and specific features from multiple input images and combining them into a single image which has all essential information. Image fusion methods which have been proposed in DCT domain are very convenient and time-saving in real-time applications. The fused output image of existing methods in DCT domain has low quality due to the side effects of their algorithms. In this article, an efficient and simple image fusion method using improved variance criteria is presented. The proposed method uses sharpened input images to make a larger difference between the variance of the corresponding input image’s blocks. In addition, by adjusting two threshold values for recognizing the corresponding blocks which have close variance values, the quality of the output image is enhanced significantly. The results of conducting the proposed algorithm with gray-scale multi-focus images and evaluating the performance of the proposed method in comparison with the well-known methods confirm significant improvements in the quality of the output image. Finally, we demonstrate the simplicity of applying our method on color multi-focus images.
A new multi-focus image fusion technique based on variance in DCT domain Matlab Code (C) Mostafa Amin-Naji, Babol Noshirvani University of Technology, Mostafa.Amin.Naji@Gmail.com, PLEASE CITE THE ABOVE PAPERS IF YOU USE THIS CODE
My Official Website: www.Amin-Naji.com
A new multi-focus image fusion technique based on variance in DCT domain MATLAB Code is the simulation of the following multi-focus image fusion methods in DCT domain:
(1) DCT+Sharp (2) DCT+Sharp+CV
proposed in:
M. A. Naji and A. Aghagolzadeh, “A new multi-focus image fusion technique based on variance in DCT domain,” in 2015 2nd International Conference on Knowledge-Based Engineering and Innovation (KBEI), 2015, pp. 478-484. https://doi.org/10.1109/KBEI.2015.7436092
Matlab Code:
function [FusedDCTSharp,FusedDCTSharp_CV]= DCT_Sharp(im1, im2)
% C)Mostafa Amin-Naji, Babol Noshirvani University of Technology,
% My Official Website: www.Amin-Naji.com
% My Email: Mostafa.Amin.Naji@Gmail.com% PLEASE CITE THE BELOW PAPERS IF YOU USE THIS CODE
% M. A. Naji and A. Aghagolzadeh, “A new multi-focus image fusion technique
% based on variance in DCT domain,” in 2015 2nd International Conference on
% Knowledge-Based Engineering and Innovation (KBEI), 2015, pp. 478-484.
% https://doi.org/10.1109/KBEI.2015.7436092% Inputs:
% im1 : First source image
% im2 : Second source image
%
% Outputs:
% FusedDCTSharp : Fused image as the result of “DCT+Sharp” method
% FusedDCTSharp_CV : Fused image as the result of “DCT+Sharp+CV” method
%
%
% Sample use:
% im1 = imread(‘pepsi1.tif’);
% im2 = imread(‘pepsi2.tif’);
% [FusedDCTSharp,FusedDCTSharp_CV]= DCT_Sharp(im1, im2);if nargin ~= 2 % Check the correct number of arguments
error(‘There should be two input images!’)
endif size(im1,3) == 3 % Check if the images are grayscale
im1 = rgb2gray(im1);
end
if size(im2,3) == 3
im2 = rgb2gray(im2);
endif size(im1) ~= size(im2) % Check if the input images are of the same size
error(‘Size of the source images must be the same!’)
end% Obtain sharpened images by passing the images through a
% high-pass filter (Unsharp Filter)h = fspecial(‘unsharp’);
im1_sharp=imfilter(im1,h,’symmetric’);
im2_sharp=imfilter(im2,h,’symmetric’);% Get input image size
[m,n] = size(im1);
FusedDCTSharp = zeros(m,n);
FusedDCTSharp_CV = zeros(m,n);
Map = zeros(floor(m/8),floor(n/8));% Level shifting
im1 = double(im1)-128;
im2 = double(im2)-128;
im1_sharp = double(im1_sharp)-128;
im2_sharp = double(im2_sharp)-128;% Divide source images into 8*8 blocks and perform the fusion process
for i = 1:floor(m/8)
for j = 1:floor(n/8)im1s = im1(8*i-7:8*i,8*j-7:8*j);
im2s = im2(8*i-7:8*i,8*j-7:8*j);
im1Sub = im1_sharp(8*i-7:8*i,8*j-7:8*j);
im2Sub = im2_sharp(8*i-7:8*i,8*j-7:8*j);
% Compute the 2-D DCT of 8*8 blocks
im1sdct = dct2(im1s);
im2sdct = dct2(im2s);
im1SubDct = dct2(im1Sub);
im2SubDct = dct2(im2Sub);
% Calculate normalized transform coefficients
im1Norm = im1SubDct ./ 8;
im2Norm = im2SubDct ./ 8;% Mean value of 8*8 block of images (Measure for surrounding lumminance)
im1Mean = im1Norm(1,1);
im2Mean = im2Norm(1,1);% Variance of 8*8 block of images
im1Var = sum(sum(im1Norm.^2)) – im1Mean.^2;
im2Var = sum(sum(im2Norm.^2)) – im2Mean.^2;t=60;
if im1Var > (im2Var+t)
dctSub = im1sdct;
Map(i,j) =-1; % Consistency verificationend
if im1Var < (im2Var-t)
dctSub = im2sdct;
Map(i,j) = +1; % Consistency verification
end
%
if im1Var < (im2Var+t)&& im1Var > (im2Var-t)
Map(i,j)=0;% dctVarSub=((im1Var)/(im1Var+im2Var)).*im1sdct+((im2Var)/(im1Var+im2Var)).*im2sdct;
dctSub = (im1sdct+im2sdct)./2;end
% Compute the 2-D inverse DCT of 8*8 blocks and construct fused image
FusedDCTSharp(8*i-7:8*i,8*j-7:8*j) = idct2(dctSub); % DCT+Variance methodend
end% Concistency verification using a Majority Filter
fi = ones(3)/9; % Filter kernel 7*7cvMapFiltered = imfilter(Map, fi,’symmetric’); % Filtered index map
for i = 1:m/8
for j = 1:n/8
% DCT+Variance+CV methodFusedDCTSharp_CV(8*i-7:8*i,8*j-7:8*j) =(((1-cvMapFiltered(i,j))/2)*im1(8*i-7:8*i,8*j-7:8*j))+(((1+cvMapFiltered(i,j))/2)*im2(8*i-7:8*i,8*j-7:8*j));
end
endfor i = 1:m/8
for j = 1:n/8
% DCT+Variance+CV method
if cvMapFiltered(i,j) < -0.06
FusedDCTSharp_CV(8*i-7:8*i,8*j-7:8*j) = im1(8*i-7:8*i,8*j-7:8*j);end
if cvMapFiltered(i,j) > 0.06
FusedDCTSharp_CV(8*i-7:8*i,8*j-7:8*j) = im2(8*i-7:8*i,8*j-7:8*j);end
end
end% inverse shift
im1 = uint8(double(im1)+128);
im2 = uint8(double(im2)+128);
FusedDCTSharp = uint8(double(FusedDCTSharp)+128);
FusedDCTSharp_CV = uint8(double(FusedDCTSharp_CV)+128);
figure, imshow(im1), title(‘source image 1’);
figure, imshow(im2), title(‘source image 2’);
figure, imshow(FusedDCTSharp), title(‘dct+variance’);
figure, imshow(FusedDCTSharp_CV), title(‘dct+variance+cv’);